






The little-noted issue of radar safety is emerging as a potential Achilles heel of driver-assist and highly automated vehicles: radar signals interfere with each other which can cause minor errors at best and total blindness at worst.
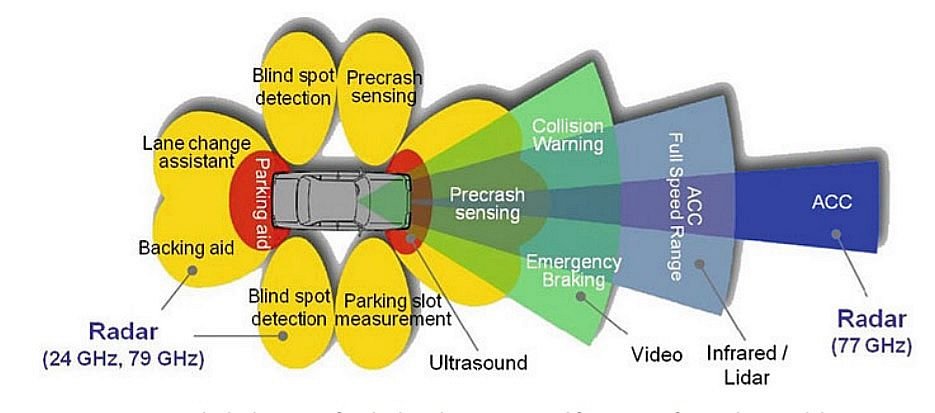
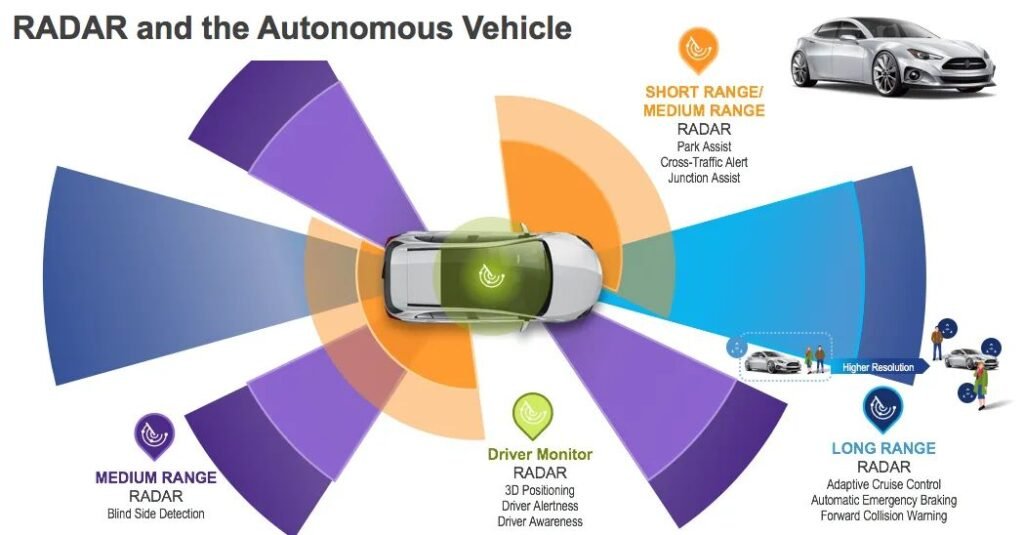
Radar has become an essential sensing modality complementing CMOS imaging cameras. It works in all weather conditions and enables a range of automated driving features, including automatic emergency Bbrakes (AEB).
But they can be foiled or faulty if they end up crossing each other’s streams.
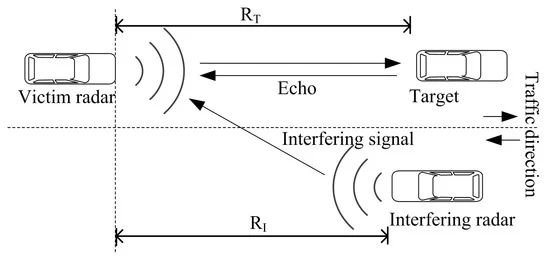
Radar works by sending out radio waves and then listening for the echo of the radio waves that bounce back off of things. It’s not a perfect system, but it’s useful at seeing where things are and how far away they are.
It’s not the only way for a car to know this, as vision-only systems like what Tesla is working on and lidar (light radar) systems most other AV developers rely on provide great alternatives.
The problem is kind of like walking around with a bunch of other people in the dark, and everybody has a flashlight.
This approach to using flashlights might work okay for one person, but the problem is that your flashlights are pointing in other people’s eyes, and making their flashlights worthless because you’re blinding them.
As all cars are using the same frequency band this, will potentially worsen as fitment rate increases.
Instead of working on coordinating different systems so they don’t blind each other the current industry standard for radar is to just be random and hope it works out.
The radars use random frequencies and timing so they don’t hurt each other as badly, but this approach won’t work in the future when most cars on the road are using it.
Reference- The National Highway Traffic Safety Administration Study, Clean Technica, EE Times, ST Microelectronics website